เกาะกระแส “อินเตอร์เฟซหุ่นยนต์แบบ Remote Work” จะเป็นธุรกิจใหม่ได้จริงหรือไม่?
- Share :



- 2,177 Reads
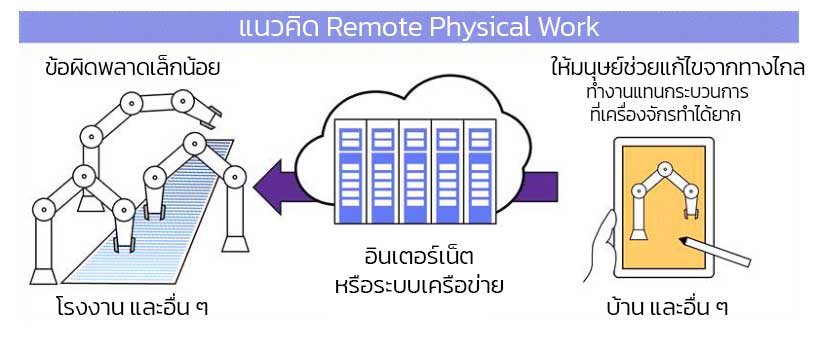
การควบคุมหุ่นยนต์จากทางไกลมีความก้าวหน้ายิ่งขึ้น ช่วยให้การทำงานบางอย่างมีความคล่องตัวขึ้น จนเกิดเป็นความพยายามในการพัฒนาเทคโนโลยี Remote Physical Work ที่มี “อินเตอร์เฟซสำหรับควบคุมหุ่นยนต์ (Interface for Robot)” เป็นกุญแจสำคัญ และกำลังเป็นโมเดลธุรกิจใหม่ที่น่าจับตา
เมื่อวันที่ 4 พฤษภาคม 2022 สำนักข่าว Nikkan Kogyo Shimbun รายงานความคืบหน้าของญี่ปุ่นในความพยายามพัฒนาเทคโนโลยีและโมเดลธุรกิจ Interface for Robot รายละเอียดดังนี้
2 ค่ายใหญ่ร่วมทุนลุยธุรกิจใหม่ เตรียมให้บริการแพลตฟอร์ม
| Advertisement | |
 |
|

นาย Shogo Hasegawa รองประธานบริษัท Remote Robotics บริษัทร่วมทุนระหว่าง Kawasaki และ Sony Group ซึ่งก่อตั้งขึ้นเพื่อให้บริการ Interface ควบคุมหุ่นยนต์แบบเช่ารายเดือน กล่าวว่า อินเตอร์เฟซสำหรับควบคุมหุ่นยนต์ทางไกลมีหลายรูปแบบขึ้นอยู่กับความต้องการและลักษณะงาน ซึ่งทางบริษัทจะเปิดให้บริการแพลตฟอร์มที่ออกแบบมาเฉพาะในแต่ละลักษณะการใช้งานภายในปี 2022
แกนสำคัญของธุรกิจอินเตอร์เฟซหุ่นยนต์ คือ หุ่นยนต์จะต้องถูกควบคุมจากทางไกล และทำงานได้อย่างมีประสิทธิภาพ ยกตัวอย่างเช่น การใช้งานหุ่นยนต์แขนกลแบบ 2 แขน ผู้ใช้จะต้องแยกแยะได้ว่า “ควรจับอะไร ควรจับตรงไหน” สิ่งสำคัญก็คือ อินเตอร์เฟซที่ส่งข้อมูลจากโรงงานไปยังผู้ควบคุมหุ่นยนต์ เพื่อให้ผู้ใช้มีข้อมูลที่เพียงพอ และสั่งให้หุ่นยนต์หยิบจับชิ้นงานได้ง่าย

อินเตอร์เฟซของบริษัท Remote Robotics ใช้แท็บเล็ตในการควบคุมหุ่นยนต์
ซึ่งแม้ว่า ปัจจุบันจะมีความพยายามพัฒนาเอไอ หรือ ปัญญาประดิษฐ์ (Artificial Intelligence: AI) แต่เอไอที่ทำงานได้ตามความต้องการนั้นยังห่างไกลความจริงอีกมาก เช่น การแยกขยะในโรงงานรีไซเคิล ซึ่งแม้ว่าจะออกแบบให้เอไอแยกขวดแก้วตามสีได้ แต่ในความเป็นจริง ขวดเหล่านี้มีฉลาก อีกทั้งยังมีขวดที่แตกหัก ทำให้การทำงานอัตโนมัติเป็นไปได้ยาก
ด้วยเหตุนี้เอง ทำให้ความสำคัญของผู้ใช้หุ่นยนต์เพิ่มมากขึ้น ส่งผลให้ความต้องการอินเตอร์เฟซควบคุมหุ่นยนต์ทางไกลเพิ่มขึ้นตามไปด้วย ยกตัวอย่างเช่นการแยกสินค้า ซึ่งสามารถใช้ในศูนย์กระจายสินค้า ไปจนถึงการชั่งตวงสารเคมี ซึ่งนาย Shogo Hasegawa อธิบายว่า บริษัทมีความต้องการพัฒนาอินเตอร์เฟซที่ทำงานได้โดยไม่ต้องเขียนโปรแกรมเพิ่ม เพื่อให้ System Integrator ใช้งานได้ง่ายอีกด้วย
ความท้าทายของหุ่นยนต์เมื่อหยิบจับชิ้นงานใหม่ ๆ
บริษัท Okamura กำลังพัฒนาระบบ Picking สำหรับศูนย์กระจายสินค้า และอยู่ระหว่างการทดสอบอินเตอร์เฟซ “Data Glove” ซึ่งสามารถป้อนข้อมูลได้ผ่านการเคลื่อนไหวของมือหุ่นยนต์ได้โดยตรง

Picking Robot ของบริษัท Okamura
ทางบริษัทเปิดเผยว่า ในทุกวันของการทำงานที่ศูนย์กระจายสินค้า บริษัทต้องบริหารจัดการสินค้าใหม่จำนวนมาก ยิ่งสินค้ามีความหลากหลาย กระบวนการ Picking ก็ยุ่งยากมากขึ้น การพัฒนาให้มีรูปแบบที่เป็นมาตรฐานทำได้ยาก และตราบใดที่มีผลิตภัณฑ์ใหม่ออกมา การพัฒนาระบบหยิบจับชิ้นงานให้เป็นระบบอัตโนมัติโดยสมบูรณ์ก็เป็นเรื่องที่ยิ่งห่างไกลความเป็นจริง
ด้วยเหตุนี้ Okamura จึงเลือกใช้หุ่นยนต์และมนุษย์ร่วมกันในการหยิบจับชิ้นงานใหม่ ๆ โดยผู้ใช้จะทำการควบคุมแขนกลหุ่นยนต์จากทางไกล ซึ่ง Data Glove จะช่วยให้ผู้ใช้สามารถควบคุมการเคลื่อนไหวของมือหุ่นยนต์ได้ด้วยการขยับมือเหมือนหยิบจับชิ้นงานด้วยตัวเอง
นอกจากนี้ บริษัทอื่นที่อยู่ระหว่างการพัฒนาระบบใกล้เคียงกันก็มีอยู่ ยกตัวอย่างเช่น Fujitsu Advanced Engineering ซึ่งใช้แท็บเล็ตในการสั่งการ ซึ่งพนักงานหนึ่งคน สามารถควบคุมหุ่นยนต์หยิบจับสินค้าได้ 3 - 4 เครื่องพร้อมกัน โดยใช้เวลาประมาณ 2 - 3 วินาทีในการสั่งการ และราว 5 วินาทีในการหยิบจับชิ้นงาน
นาย Hiroki Murakami ประธานสมาคมวิทยาการหุ่นยนต์แห่งประเทศญี่ปุ่น (RSI) และผู้อำนวยการฝ่ายเทคนิคบริษัท IHI อธิบายว่า อินเตอร์เฟซควบคุมหุ่นยนต์ทางไกลยิ่งเรียบง่ายก็ยิ่งดี เพราะความเรียบง่ายนี้จะช่วยให้มนุษย์สามารถทำงานได้อย่างมีประสิทธิภาพมากขึ้น และเปรียบเทียบให้เห็นภาพง่าย ๆ ว่า การควบคุมหุ่นยนต์ควรจะเหมือนอีสปอร์ต (eSports) ที่ใคร ๆ ก็เล่นได้ แต่ถ้าจะแข่งขันก็ต้องการทักษะและความแม่นยำที่มากขึ้น
ซึ่งหุ่นยนต์เองก็เช่นเดียวกัน การควบคุมหุ่นยนต์ทางไกลควรทำได้ง่าย แสดงข้อมูลจากโรงงานให้ผู้ใช้เห็นภาพชัดเจน และใช้ความสามารถในการตัดสินใจของมนุษย์ให้เป็นประโยชน์เพื่อให้กระบวนการมีประสิทธิภาพและมีเสถียรภาพมากที่สุด
การทำงานของ Tower Crane ให้ความรู้สึกสมจริงผ่านหน้าจอ
ไม่ใช่เพียงงานในโรงงานเท่านั้น แต่งานอื่น ๆ ก็มีความต้องการควบคุมทางไกลเช่นกัน โดย Kashima, Takenaka Corporation, Aktio, และ Kanamoto ได้ร่วมกันพัฒนา “TawaRemo” ระบบควบคุมเครนหอสูง (Tower Crane) จากทางไกล ซึ่งผู้ใช้สามารถควบคุมเครนได้ด้วยคันโยกและสวิตช์ร่วมกับจอภาพขนาดใหญ่

“TawaRemo” ระบบควบคุมเครนหอสูงจากทางไกล
ที่ผ่านมา การควบคุมเครนหอสูงเป็นงานที่มีความลำบาก ผู้ควบคุมต้องนั่งในเครนที่ยกสูงตลอดวัน ไปไหนมาไหนไม่สะดวกแม้แต่การเข้าห้องน้ำ ซึ่งหากเปลี่ยนมาควบคุมทางไกลได้ ก็จะทำให้สภาพแวดล้อมในการทำงานดีขึ้นเป็นอย่างมาก โดยเบื้องต้น ทางบริษัทได้พัฒนาระบบควบคุมนี้ให้ทำงานจากไซต์ก่อสร้าง และมีแผนต่อยอดให้ทำงานจากนอกไซต์ก่อสร้างได้ภายในปี 2022 นี้ และมีแผนนำเสนอให้กับสมาคมก่อสร้างซึ่งมีผู้เข้าร่วมกว่า 73 บริษัทเพื่อให้ระบบกลายเป็นที่แพร่หลายมากขึ้น
จะเห็นได้ว่า การควบคุมหุ่นยนต์ทางไกลกำลังเข้าใกล้ความเป็นจริงมากขึ้น อย่างไรก็ตาม ปัญหาที่ยังแก้ไม่ตกคือรูปแบบธุรกิจ เพราะแม้ว่าจะมีความต้องการสูง แต่หากเป็นโรงงานทั่วไปและไม่ใช่กระบวนการที่ต้องการความเชี่ยวชาญเป็นพิเศษแล้วก็มักจะมีวิศวกรที่พร้อมเข้าแก้ไขปัญหาต่าง ๆ ได้ในทันที
นอกจากนี้ การควบคุมหุ่นยนต์ทางไกลยังต้องคำนึงถึงต้นทุนและความเสี่ยงอีกด้วยว่าผลลัพธ์ที่ได้จะคุ้มค่าหรือไม่ ซึ่ง Okamura และ Remote Robotics กำลังอยู่ระหว่างการเจรจากับ Pasona และ Persol Holdings เพื่อพัฒนาโครงสร้างรูปแบบการทำงานที่บริษัทและพนักงานจะได้รับผลประโยชน์จากการทำงานทางไกล และได้รับค่าตอบแทนที่เหมาะสม
นอกจากนี้ ทั้งสองบริษัทยังอยู่ระหว่างการร่างแนวคิดการระดมทุนเพื่อรวบรวมและอบรมพนักงานให้สามารถควบคุมหุ่นยนต์ทางไกลได้ผ่านอินเทอร์เน็ต และช่วยเป็นเป็นตัวกลางระหว่างผู้ควบคุมหุ่นยนต์และบริษัทต่าง ๆ อีกด้วย
คาดการณ์ว่า กระบวนการที่จะมีความต้องการการควบคุมหุ่นยนต์จากทางไกลมากที่สุด คือการแก้ไขปัญหาที่เกิดขึ้นหน้าไซต์งาน ทำให้ทางบริษัทเตรียมพัฒนาโปรแกรมสำหรับการแก้ไขปัญหาในสายการผลิต หรือศูนย์โลจิสติกส์จากทางไกลไว้หลายรายการ หากการควบคุมหุ่นยนต์จากทางไกลสามารถแก้ไขปัญหาต่าง ๆ ให้กับบริษัทได้แล้ว ก็จะสามารถช่วยลดค่าใช้จ่ายลงได้ และช่วยลดความต้องการพนักงานหน้าไซต์งานจริง
อย่างไรก็ตาม นาย Shogo Hasegawa ย้ำว่า การที่ระบบควบคุมหุ่นยนต์ทางไกลได้จำเป็นต้องมีผู้ใช้ที่มีความชำนาญด้วย นำไปสู่ปัญหาถัดมา คือ จำนวนบุคลากรที่มีจำกัด
ด้วยเหตุนี้ การฝึกฝนให้พนักงานสามารถควบคุมหุ่นยนต์จากทางไกลได้จึงมีความจำเป็นอย่างยิ่ง สอดคล้องกับการระดมทุนเพื่อรวบรวมและอบรมพนักงาน ซึ่งหากทำได้สำเร็จ ก็จะทำให้ Remote Working สามารถต่อยอดออกไปได้ไกลยิ่งขึ้น จึงต้องติดตามกันต่อไปว่า อินเตอร์เฟซสำหรับควบคุมหุ่นยนต์ในอนาคตจะเป็นอย่างไร และจะสามารถสร้างโมเดลธุรกิจใหม่ ๆ ได้จริงหรือไม่
#Robot Interface #Interface for Robot #Remote Physical Work #Remote Work #Remote Working #AI #SI #ปัญญาประดิษฐ์ #หุ่นยนต์ #โรงงานอุตสาหกรรม #เทรนด์ธุรกิจ #M Report #mreportth #วงในอุตสาหกรรม #ข่าวอุตสาหกรรม #onlinecontent
ที่มา: Nikkan Kogyo SHimbun
บทความยอดนิยม 10 อันดับ
- 10 ตัวอย่างที่นำ 5G มาใช้งานได้อย่างน่าสนใจและประสบผลสำเร็จ
- เทคโนโลยีแห่ง G สู่ 5G เครือข่ายไร้สาย
- แบตเตอรี่ลิเธียมไอออนคืออะไร ตลาดจะก้าวไปในทางไหนในปี 2030?
- เทคโนโลยีสำหรับโลจิสติกส์ ทางเลือกสู่ทางรอด ปรับก่อนโดนเบียด
- นิยามใหม่ SME ใช้ “รายได้” เป็นตัวกำหนด
- ธุรกิจที่ได้รับผลกระทบจาก COVID-19 ปี 2564
- กลยุทธ์การ PR และ Communication ในยุคดิจิทัล
- ปัญหาตู้คอนเทนเนอร์ขาดแคลน เจาะลึกตู้สินค้าหายไปไหน?
- เทรนด์การทำงานในอนาคต หลังไทยติดโควิด นานเกือบสองปี!
- FTA ไทย มีกี่ประเทศ พอหรือไม่ ทำไมต้องคิดเรื่อง CPTPP
อัปเดตข่าวทุกวันที่นี่ www.mreport.co.th
Line / Facebook / Twitter / YouTube @MreportTH