
เทคนิคแขนหุ่นยนต์ ร่วม เครื่องพิมพ์ 3 มิติ จากงานแสดงเทคโนโลยีหุ่นยนต์ระดับโลก World Robot Summit 2018
- Share :



- 1,229 Reads
ที่ผ่านมา การประกอบชิ้นงานโดยเฉพาะชิ้นงานขนาดเล็ก จำเป็นต้องใช้แขนหุ่นยนต์ หรืออุปกรณ์ที่มีความแม่นยำสูง และด้วยคุณสมบัติในการเปลี่ยนมือของแขนหุ่นยนต์ที่หลากหลาย ทำให้แขนหุ่นยนต์สามารถทำงานกับชิ้นงานได้หลายชนิด จึงนำสู่แนวคิดการใช้ Jig และ Fixture ที่ผลิตขึ้นจากเครื่องพิมพ์ 3 มิติ หรือ 3D Printer เพื่อให้แขนหุ่นยนต์รองรับการทำงานของชิ้นงานต่าง ๆ ได้อย่างเหมาะสม
อย่างไรก็ตาม กระบวนการประกอบชิ้นงานขนาดเล็กจำเป็นต้องใช้ความแม่นยำในการประกอบมากเป็นพิเศษ ซึ่งในบางครั้ง 3D Printer อาจจะไม่สามารถพิมพ์ชิ้นส่วนได้แม่นยำเพียงพอ ส่งผลให้แนวคิดนี้ยังมีอุปสรรค
ภายในงานจัดแสดงเทคโนโลยีหุ่นยนต์ระดับโลก “World Robot Summit 2018” นี้เอง ที่ University of Southern Denmark ได้จัดแสดงบูธสาธิตการใช้ 3D Printer ร่วมกับแขนหุ่นยนต์ ซึ่งได้แสดงศักยภาพในการประกอบชิ้นส่วนขนาดเล็กบนสายพานลำเลียง เช่น ตะปูเกลียว แหวนรอง ตลับลูกปืน และอื่น ๆ ได้เป็นอย่างดี
3D Printer และชิ้นส่วนที่พิมพ์ออกมาภายในบูธของ University of Southern Denmark
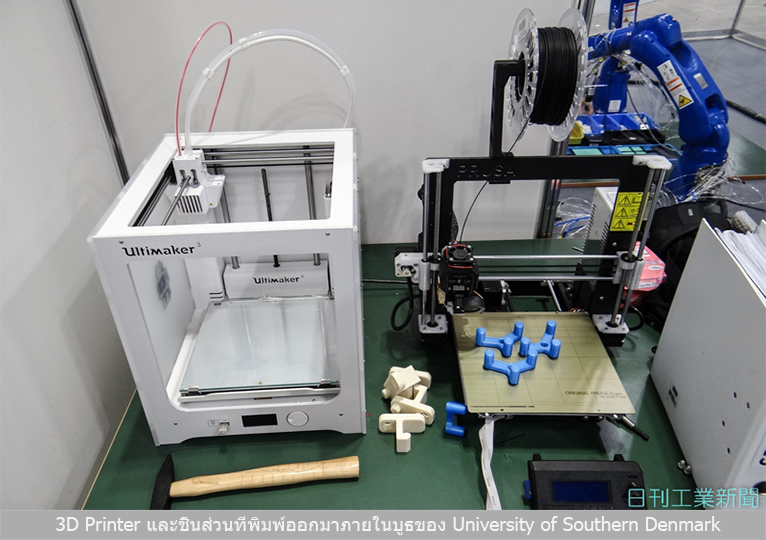
โดย University of Southern Denmark ได้ใช้ 3D Printer พิมพ์ Jig และ Fixture สำหรับชิ้นงานในขั้นตอนที่ไม่ต้องใช้ความแม่นยำมากนัก และขั้นตอนที่จำเป็นต้องขยับชิ้นงานเพียงเล็กน้อย เช่น การหมุนชิ้นส่วนให้ตรงกับรู คู่กับระบบมาตรวัด 3 มิติ และ Force Sense Control ซึ่งทำหน้าที่เป็นเซ็นเซอร์
ในส่วนของขั้นตอนการทำงาน University of Southern Denmark ได้ติดตั้งแขนหุ่นยนต์เอาไว้ 2 เครื่องพร้อมกับ 3D Printer ซึ่งในการทำงานนั้น เซ็นเซอร์จะทำหน้าที่วัดรูปทรงของชิ้นงาน และ Jig ที่เสียบเอาไว้ในรูบนโต๊ะ ก่อนจับคู่ให้แขนหุ่นยนต์เลือกใช้ Jig ที่เหมาะสมกับชิ้นงาน สามารถลดขั้นตอนการประกอบชิ้นงานในส่วนนี้ลงได้เป็นอย่างมาก และคงขั้นตอนการประกอบที่ต้องใช้ความแม่นยำสูงให้เป็นหน้าที่ของพนักงานตามเดิม โดยศาสตราจารย์ Tetsuyou Watanabe จากมหาวิทยาลัยคานาซาวะ ได้กล่าวแสดงความเห็นต่อเทคนิคนี้ว่า เป็นเทคนิคที่สามารถนำไปใช้ได้โดยไม่จำเป็นต้องเปลี่ยนแปลงไลน์การผลิตเดิมมากนัก และสามารถรองรับการทำงานได้หลายรูปแบบ รวมถึงสามารถประยุกต์ในการนำไปใช้จัดเรียงชิ้นส่วน หรือเปลี่ยนชิ้นส่วนของชิ้นงานเดิมได้อีกด้วย





