ข้อต่อทรงกลม สู่หุ่นยนต์อุตสาหกรรมที่ “หมุนได้รอบทิศ”
- Share :



- 1,867 Reads
Mr. Riichiro Tadakuma รองศาสตราจารย์มหาวิทยาลัยยามากาตะ ร่วมกับ NEC Embedded Products (NECEP) พัฒนาข้อต่อขนาดเล็ก รูปทรงกลม สำหรับหุ่นยนต์อุตสาหกรรมแบบ 2 แกน ซึ่งมีคุณสมบัติในการหมุนได้รอบโดยไม่มีข้อจำกัด
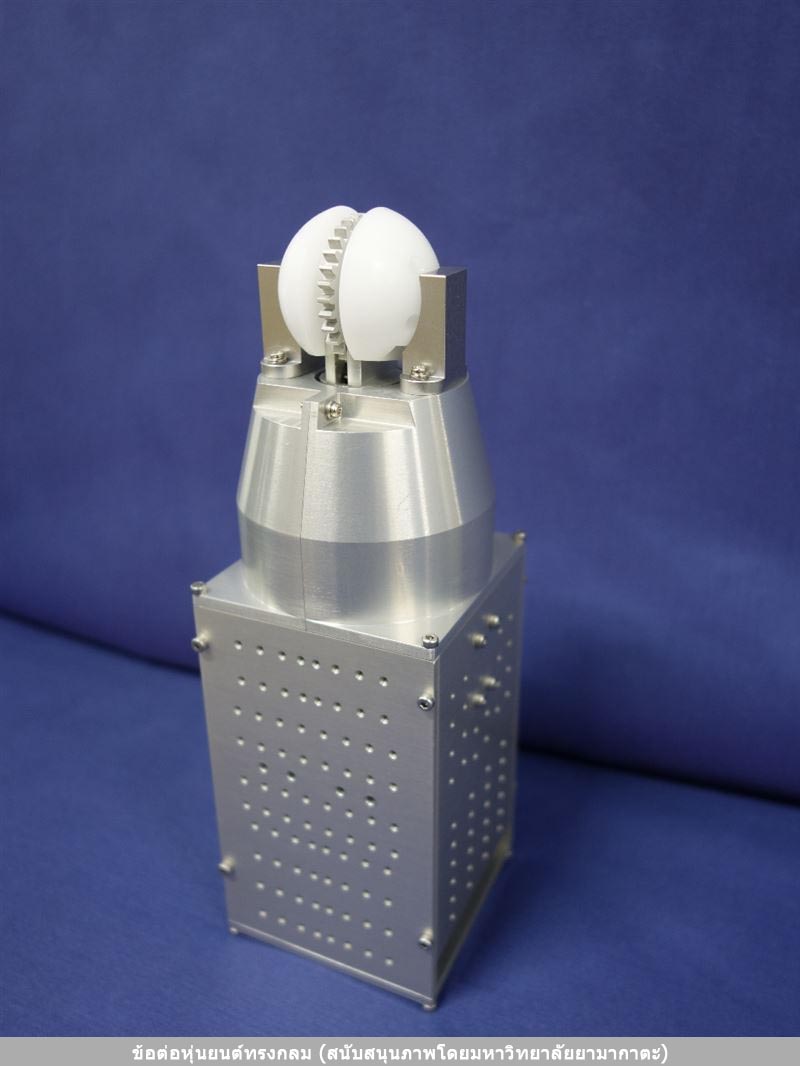
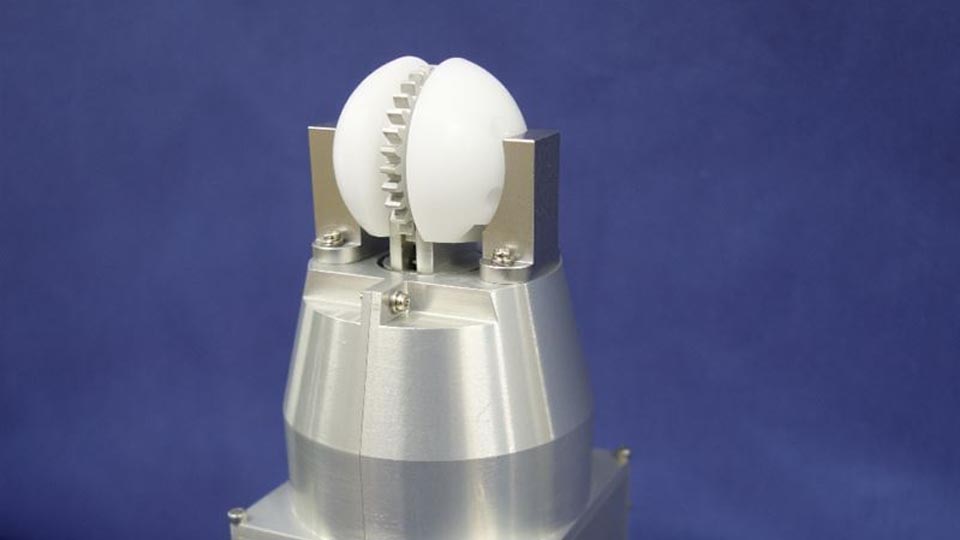
โดยข้อต่อทรงกลมนี่ ถูกออกแบบให้ส่วนกลางของทรงกลมมีรูปทรงแบบเฟือง ซึ่งจะรับกับการหมุนของมอเตอร์ที่ถูกส่งผ่านเฟืองตรง และเฟืองตัวหนอน โดยส่วนฐานจะติดตั้งมอเตอร์ไว้อีกหนึ่งตัว โครงสร้างดังกล่าวนี้ จะช่วยให้มอเตอร์สามารถหมุนได้รอบทิศทาง
จากการทดสอบโดยมหาวิทยาลัย พบว่าข้อต่อชนิดนี้มีประสิทธิภาพการถ่ายทอดกำลัง (Power Transmission Efficiency) ของเฟืองตรงอยู่ที่ 98 - 99.5% และของเฟืองตัวหนอนอยู่ที่ 30 - 90% ซึ่งประสิทธิภาพการถ่ายทอดกำลังนี้ จะขึ้นอยู่กับการจัดวางมอเตอร์และแรงขับ ซึ่งสามารถปรับให้เหมาะสมได้
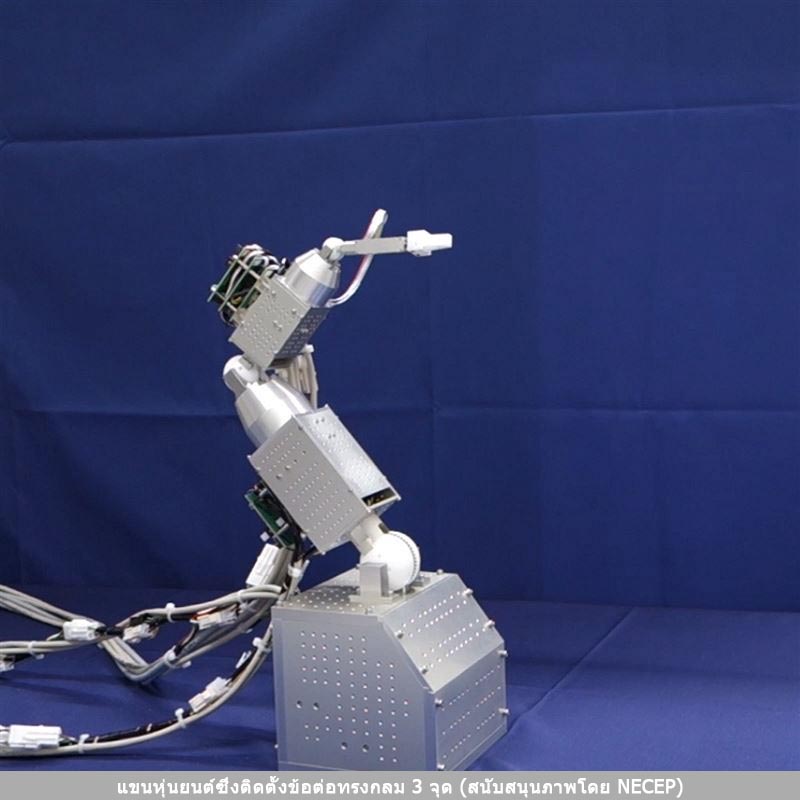
เนื่องจากหมุนได้ไม่จำกัดรอบ แขนหุ่นยนต์ที่ใช้ข้อต่อทรงกลมนี้จึงสามารถขยับแบบเดียวกับเพลารถหรือไฟหมุนได้ อีกทั้งจากการทดลองนำข้อต่อทรงกลมนี้ไปประกอบกับแขนหุ่นยนต์ พบว่า แขนหุ่นยนต์ สามารถเคลื่อนไหวได้ใกล้เคียงกับแขนของมนุษย์ เนื่องจากมีโครงสร้างใกล้เคียงกัน จึงสามารถใช้จำลองการเคลื่อนไหวของมนุษย์ได้ง่ายกว่าข้อต่อทั่วไป ผู้ควบคุมจึงสามารถบังคับแขนหุ่นยนต์ได้ง่ายยิ่งขึ้น
ดังนั้น หากนำข้อต่อชนิดนี้ไปใช้กับโดรนหรือหุ่นยนต์กู้ภัย โดยติดกล้องเพิ่มเติมแล้ว ก็จะสามารถทำงานได้สะดวกขึ้นอีกด้วย
ปัจจุบัน ผู้พัฒนาอยู่ระหว่างการออกแบบข้อต่อทรงกลมนี้ให้สามารถนำไปใช้กับกล้องวงจรปิด ระบบอัตโนมัติ และอื่น ๆ โดยมีกำหนดเปิดเผยรายละเอียดเพิ่มเติมในงาน “ET & IoT Technology 2018” ที่จะจัดขึ้นที่ประเทศญีปุ่นในวันที่ 14 พฤศจิกายนนี้



.jpg)
