Harvard's Microrobot โรบอท แรงบันดาลใจจากแมลงสาบ
- Share :



- 1,083 Reads
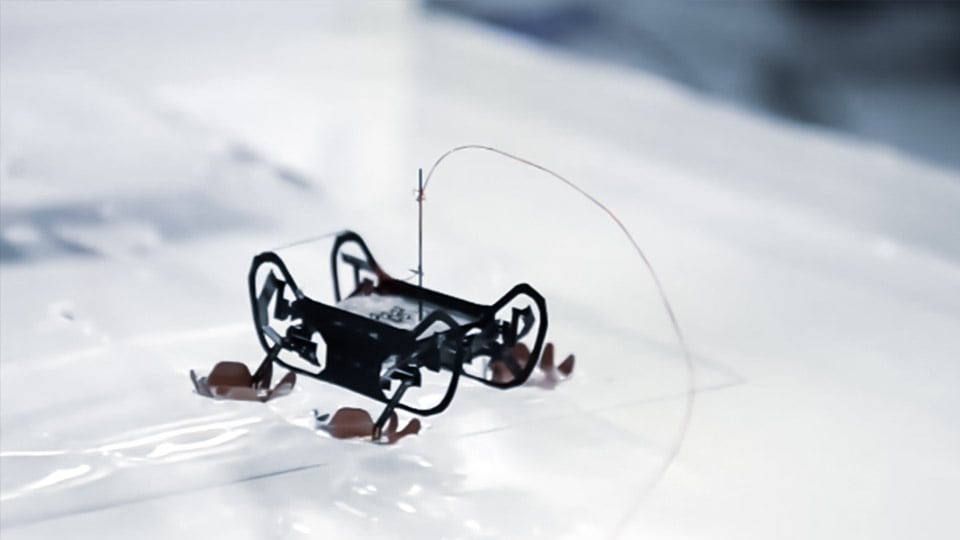
มหาวิทยาลัยฮาร์วาร์ดพัฒนาไปอีกขั้นกับการสร้างโรบอทสะเทินน้ำสะเทินบกขนาดเล็ก ที่ชื่อว่า Harvard's Microrobot หรือที่รู้จักกันในชื่อ HAMR เจ้าโรบอทตัวนี้ได้รับแรงบันดาลใจมาจากแมลงสาบ ซึ่งเป็นที่รู้กันโดยทั่วไปว่าธรรมชาติของแมลงสาบสามารถอยู่รอดในน้ำได้ 30 นาที อยู่ยงคงกระพัน และสามารถเคลื่อนที่ได้รวดเร็ว HAMR จึงเป็นหุ่นยนต์อเนกประสงค์ที่สามารถวิ่งได้ด้วยความเร็วสูง ไต่ขึ้นในที่เอียงชัน ขนส่งเซ็นเซอร์ขนาดเล็กไปยังพื้นที่ภาคสนาม ตกจากที่สูงได้โดยไม่เกิดความเสียหาย และยังสามารถเดินบนพื้นผิวน้ำ-ดำลงใต้น้ำได้อีกด้วย ซึ่งจะช่วยในเรื่องการส่งหุ่นยนต์เข้าสู่สภาพแวดล้อมที่เสี่ยงอันตรายต่อมนุษย์ และปฏิบัติการค้นหาและกู้ภัย เช่น ภัยพิบัติทางธรรมชาติ อุบัติเหตุต่างๆ โดย HAMR จะมีเซ็นเซอร์ฝังตัวที่มีความสามารถในการเข้าถึงช่องว่างที่จำกัด และค้นหาได้อย่างรวดเร็วเพื่อช่วยระบุผู้รอดชีวิต หรือการตรวจจับสารอันตรายต่าง ๆ ที่เป็นพิษและอุณหภูมิของสารเคมี
การทำงานของ HAMR จะใช้แผ่นรองแบบมัลติฟังก์ชันที่อาศัยแรงตึงผิว ทำให้เกิดการลอยตัว หากต้องการเดินอยู่บนพื้นผิวของน้ำ แต่ถ้าหาก HAMR ต้องการจมใต้น้ำก็สามารถใช้แรงดันไฟฟ้าเพื่อทำลายพื้นผิวของน้ำให้เกิดกระบวนการ “electrowetting” ซึ่งจะทำให้พื้นผิวของน้ำและวัสดุสัมผัสกัน จากนั้นจะใช้แรงดันไฟฟ้าทำให้โรบอทจมลงใต้พื้นผิวของน้ำ
นอกจากการเดินบนพื้นผิวของน้ำและการดำลงใต้น้ำแล้ว เจ้า MicroRobot ตัวนี้ยังสามารถเลี่ยงสิ่งกีดขวางใต้น้ำได้อัตโนมัติ อีกทั้งยังสร้างกลไกการเดินบนน้ำของมันให้คล้าย ๆ กับด้วงดำน้ำ โดยการใช้ปฏิสัมพันธ์ที่ไม่เสถียรระหว่างปีกนกแบบ passive ของโรบอท กับ น้ำบริเวณรอบ ๆ ส่งผลให้หุ่นยนต์สามารถที่จะเดินบนน้ำใปข้างหน้าได้อย่างมีประสิทธิภาพ ซึ่งรู้กันดีว่าเป็นเรื่องยากสำหรับหุ่นยนต์ที่จะเดินอยู่เหนือน้ำ
John A. Paulson นักวิจัยจากคณะวิศวกรรมศาสตร์และวิทยาศาสตร์ประยุกต์ (SEAS) ของมหาวิทยาลัย Harvard กล่าวว่า "งานวิจัยชิ้นนี้แสดงให้เห็นว่าหุ่นยนต์ขนาดเล็กสามารถประยุกต์ใช้คู่กับทฤษฏีความตึงผิวในฟิสิกส์ขนาดเล็กได้ เพื่อทำหน้าที่อันท้าทายแบบที่หุ่นยนต์ขนาดใหญ่ทำไม่ได้ "
Neel Doshi นักศึกษาระดับบัณฑิตศึกษาที่ SEAS ผู้วิจัยร่วมของงานวิจัยชิ้นนี้กล่าวว่า "ขนาดของ HAMR เป็นหัวใจสำคัญในการปฏิบัติงาน ถ้ามันมีขนาดใหญ่มากก็จะเป็นสิ่งที่ท้าทายที่จะใช้โรบอทต้านกับแรงตึงผิว แต่ถ้ามันมีขนาดเล็กมากแรงตึงผิวจะไม่มีแรงมากพอที่จะทำลายมัน”
ข้อมูลเชิงเทคนิคของ HAMR
- มีน้ำหนักเพียงแค่คลิปหนีบกระดาษ (ประมาณ 1.65 กรัม)
- ความเร็วขาพายที่ความถี่ 10 เฮิรตซ์
- และสามารถรับน้ำหนักเพิ่มได้ 1.44 กรัมโดยไม่จมน้ำ
- เกราะของ HAMR จะช่วยป้องกันหุ่นยนต์จาก shorting ใต้น้ำ
Robert Wood ศาสตราจารย์ด้านวิศวกรรมและวิทยาศาสตร์ประยุกต์ของ Charles River ที่ SEAS และสมาชิกคณะแกนหลักของสถาบัน Harvard Wyss Institute for Biologically Inspired Engineering กล่าวว่า "หุ่นยนต์ตัวนี้แสดงให้เห็นถึงความสามารถของหุ่นยนต์ขนาดเล็ก ด้วยขนาดตัวที่เล็กลงทำให้การเคลื่อนไหวมีประสิทธิภาพมากขึ้น”
การวิจัย HAMR ในครั้งนี้ยังคงดำเนินต่อไป โดยปรับปรุงการเคลื่อนที่ของโรบอทและทำให้สามารถหาทางกลับสู่ฝั่งได้โดยไม่ต้องใช้ทางลาด อีกทั้งพัฒนากลไกการกระโดดอย่างฉับพลัน หรืออาจเพิ่มฟังก์ชันกาวในโรบอท ที่ได้รับแรงบันดาลใจมาจากตุ๊กแก


.png)

