
หุ่นยนต์สำรวจภายในท่อ
- Share :



- 1,935 Reads
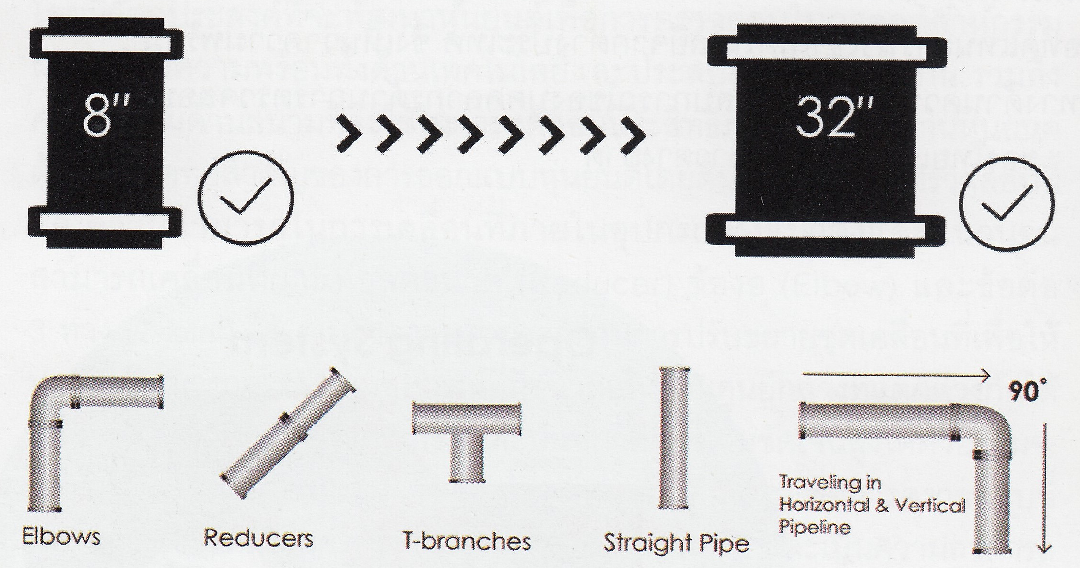
สถาบันวิจัยภาคสนาม (FIBO) มหาวิทยาลัยพระจอมเกล้าธนบุรี และ บริษัท ไทยออยล์ จำกัด (มหาชน) ร่วมมือพัฒนาหุ่นยนต์ต้นแบบเพื่อการตรวจสอบ “สำรวจภายในท่อ” โดยมีประเด็นหลักในการออกแบบเป็นความสามารถในการเคลื่อนที่ภายในอุปกรณ์ทั้งแนวตั้งและแนวนอน สามารถเคลื่อนที่ผ่านท่อลดขนาด (Reducer) ข้องอ (Elbow) และข้อต่อสามทาง (T-joint) ได้ รวมถึงสามารถถ่ายภาพและบันทึกวิดีโอที่มีความคมชัดสูงอีกด้วย ทั้งนี้ก็เพื่อที่จะให้หุ่นยนต์ต้นแบบมีความสามารถครอบคลุมในการใช้งานได้นั่นเอง
ด้วยความต้องการหุ่นยนต์ที่มีความสามารถดังกล่าว การพัฒนาหุ่นยนต์จึงต้องอาศัยการผสมผสานกันของศาสตร์ทางด้านหุ่นยนต์ โลหะวิทยา การกัดกร่อน และอิเล็กทรอนิกส์เข้าด้วยกัน เพื่อให้หุ่นยนต์มีความสามารถในการตรวจสอบหาจุดบกพร่องที่เกิดขึ้นภายในพื้นผิวของอุปกรณ์ในโรงงานอุตสาหกรรม และสามารถประเมินประดับความเสียหายได้
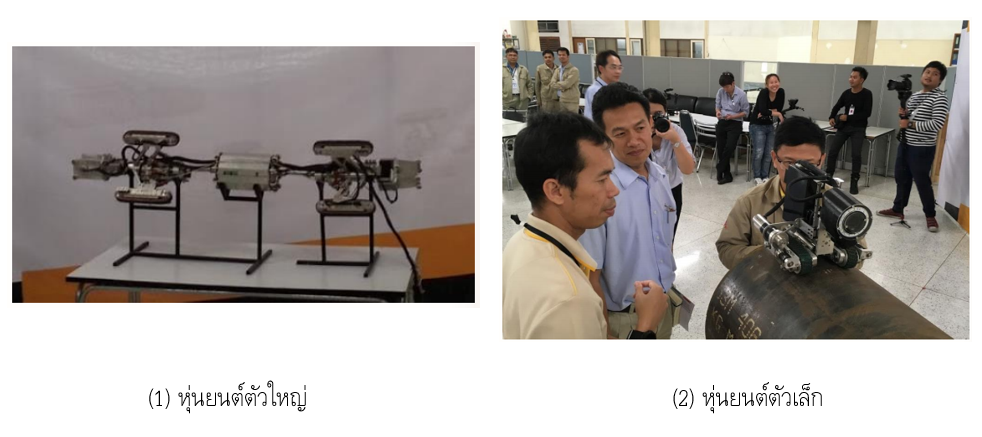
โดยทำการพัฒนาหุ่นยนต์สำรวจภายในท่อขึ้น 2 ตัว ได้แก่ หุ่นยนต์ตัวใหญ่ ที่สามารถเคลื่อนที่ในท่อแนวตั้งได้ เนื่องจากมีแขน 3 แขนที่กางออกเพื่อใช้ในการดันผนัง ยึดตัวหุ่นยนต์ไม่ให้ตกลงไป (เหมาะสำหรับการสำรวจภายในท่อที่มีขนาดเส้นผ่านศูนย์กลาง ระหว่าง 16-32 นิ้ว) และ หุ่นยนต์ตัวเล็ก ที่มีล้อเป็นแม่เหล็ก เหมาะสมในการตรวจสอบท่อที่เป็นโลหะได้ทั้งภายในและภายนอก (เหมาะสำหรับการสำรวจภายในท่อที่มีขนาดเส้นผ่านศูนย์กลาง ระหว่าง 8-32 นิ้ว)
จากการทดสอบกับอุปกรณ์ท่อขนาด 32 นิ้ว ยาว 30 เมตร พบว่าพื้นผิวภายในที่เกิดความเสียหายเล็กน้อยสามารถถูกหุ่นยนต์ตรวจสอบพบ และสามารถประเมินความเสียหายเบื้องต้นได้ ซึ่งจากผลการทดสอบนี้สามารถยืนยันได้ถึงความสำเร็จในการพัฒนา และสำหรับการทดสอบต่อไปจะเป็นเรื่องการหาจุดบกพร่องของหุ่นยนต์
หุ่นยนต์เพื่อการตรวจสอบนี้ได้รับรางวัลมากมายและได้รับการขึ้นทะเบียนจากกรมทรัพย์สินทางปัญญาเลขที่ 601004698 เมื่อวันที่ 17 สิงหาคม 2559 และมีเป้าหมายในการพัฒนาต่อโดยใช้คำตอบสั้น ๆ ที่ว่า ในเมื่อสามารถติดตั้งกล้องในตัวหุ่นยนต์ได้ ก็คงจะสามารถติดตั้งอุปกรณ์อื่น ๆ ได้เช่นกัน




